



Apr 2024 – June 2024
What?
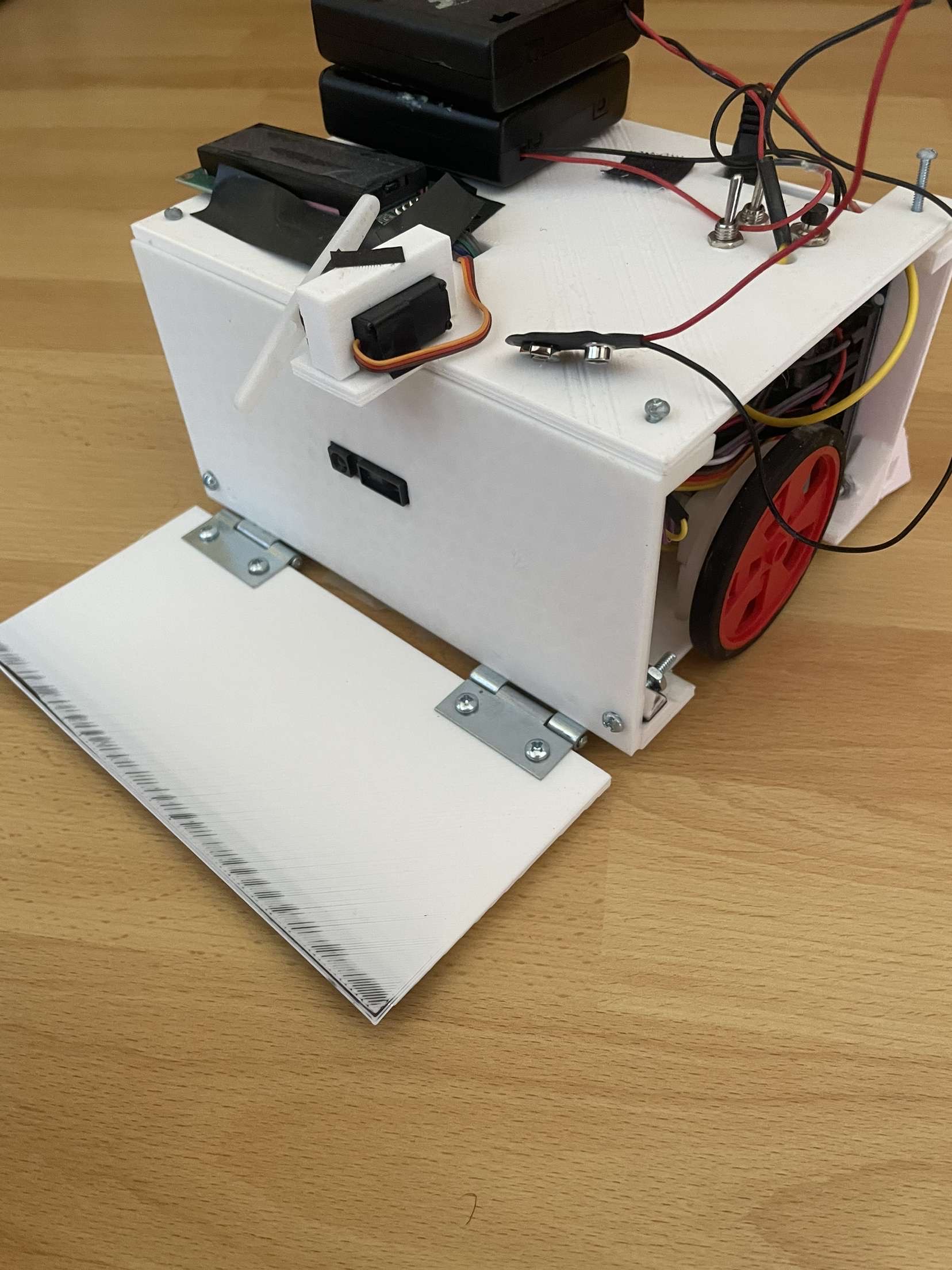
Designed and built an autonomous Arduino-powered sumo robot to detect, engage, and push opponents out of the ring in compliance with competition rules
How?
- Designed a custom 3D-printed chassis with integrated mounting for sensors and actuators
- Used an Arduino as the primary control system, powered by a 9V battery
- Supplied the motor driver with dual AA battery packs for reliable drive power
- Implemented opponent detection using ultrasonic (hypersonic) and Sharp sensors
- Integrated line detection using a superbright LED and phototransistor
- Added a servo-driven automated platform deployment mechanism
- Programmed an LCD interface to display real-time robot states (e.g., ATTACK, FINDING) based on sensor input
Result
- Delivered a competition-ready robot with optimized performance and feedback visibility
- Achieved reliable autonomous detection, decision-making, and engagement behavior
- Demonstrated robust sensor integration and power management
